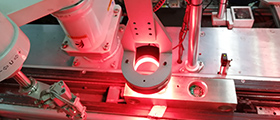
在搬运机器人上的应用
搬运机器人是可以进行自动化搬运作业的工业机器人。是近代自动控制领域出现的一项高新技术。搬运机器人可安装拉线传感器以完成各种不同形状和状态的工件搬运工作,大大减轻人力成本。
拉线位移传感器的特点
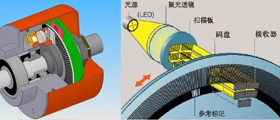
拉线传感器由拉线盒和编码器组成,安装尺寸小、结构紧凑、测量行程大、精度高的传感器,行程从一百毫米至十几米不等。

拉线式位移传感器的功能是把机械运动转换成可以计量,记录或传送的电信号。位移传感器由可拉伸的不锈钢绳绕在一个有螺纹的轮毂上,此轮毂与一个精密旋转感应器连接在一起,感应器可以是增量编码器,绝对值编码器,混合或导电塑料旋转电位计,同步器或解析器。

拉线位移传感器的工作原理
操作上,拉绳式位移传感器安装在固定位置上,拉绳缚在移动物体上。拉绳直线运动和移动物体运动轴线对准。运动发生时,拉绳伸展和收缩。一个内部弹簧保证拉绳的张紧度不变。带螺纹的轮毂带动精密旋转感应器旋转,输出一个与拉绳移动距离成比例的电信号。测量输出信号可以得出运动物体的位移、方向或速率。
常用参数有测量行程、输出信号模式、线性度、重复性、分辨率、线径规格、出线口拉力、最大往返速度、重量、输入电阻值、功率、工作电压、工作温度、震动、防护等级等。

拉线位移传感器的信号输出方式
拉绳位移传感器的信号输出方式分为数字信号输出和模拟信号输出,数字输出型可以选择增量旋转编码器、绝对值编码器等,输出信号为方波ABZ信号、正余弦信号、CANopen信号、自由RS485信号、MODBUS信号、Profibus信号或格雷码/二进制信号,测量行程长(100~15000mm),精度高(~%FS),防护等级IP65。外壳和线轮均经过防腐处理,牵引绳为316不锈钢绳,可以在恶劣的环境下(包括海水)工作。可选输出方式有:电阻型、电压型、电流型、增量脉冲型、绝对脉冲型。
模拟输出型可以选择精密电位器、霍尔编码器、绝对值编码器等,输出信号可以为4-20毫安、0-5伏、0-10伏和电阻信号等,最大行程可以达到12500毫米,使用环境最大可以达到IP65的防护等级,-45℃~+105℃的宽温度环境下使用。

拉线编码器安装注意事项
1、利用底部4个固定螺丝孔,依现场及机器安装空间设施需要,直接安装或另加保护或其他机械使用.
2、不锈钢索安装时,须注意水平角度,亦即尽量使钢索由出线口至移动部位之机构,于工作时水平滑动,保持最小角度(容许偏差+/-30)以确保量测精度及钢索之寿命.
3、钢索本体是不锈钢加涂氟层,请勿让其受外力的割伤﹑烧损﹑撞击等不当之事发生:过量的粉尘﹑积屑或是足以破坏钢索的物品贮留于内部的滑轮或出线口将造成钢索破损,导致运转不顺的故障.
4、未安装于工作台或固定坐前,请勿用手或是其它产品将钢索拉出并让其瞬间自行弹回.此举将造成钢索断裂,伤害本体结构及人身安全。
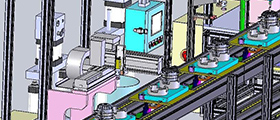
可用于测量运动距离、运动速度、感应位置或限位传感器、记录机械运动次数的计数器等。应用领域有测试、仪器计量、运输、机器人、液压装置、气动装置、工业自动化、运动控制等。测量距离从几十毫米至十几米不等, 应用较为广泛。

 在线QQ
在线QQ 186-2947-6872
186-2947-6872 在线咨询
在线咨询

 info@motion-control.com.cn
info@motion-control.com.cn