如何通过
增量编码器获取位置?
有一个驱动轨道的电机,我需要知道它的位置,在电机上连接了一个增量编码器,但我不知道如何从中获得位置。将其通电并将两个输出连接到我的程序中,当我手动转动电机轴的时候,可以看到编码器的输出数值发生变化。

如何使用编码器来确定位置(如何获得距离乘数?如何获得初始位置?)
是否可以通过计算值从1024变为0的次数,然后将该数字乘以距离来确定位置(不知道如何获得该值)。但是当系统第一次开机时,它如何知道初始位置呢?有没有办法从编码器或其他设备/方法获取此信息?
增量编码器,是无法获得“初始”位置,所能做的就是计算您远离初始位置的脉冲数。通常,在从固定基准点开始移动的系统中使用此编码器。应该将A和B输入输入正交计数器,以便为您提供方向,而不是输入模拟输入。
如何获得距离乘数?
您测量或计算您的设备将走多远,例如一整圈,例如以厘米为单位。然后,将这个长度除以编码器每转传送的脉冲数,就得到了距离乘数(以厘米/脉冲为单位)。
如果编码器旋转一圈为n mm 运动,则编码器一圈计数 = \$\frac {n}{1024}~mm\$ 运动。
如何获得初始位置?
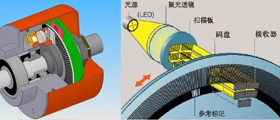
编码器本身只能告诉您相对于初始位置的旋转角度。如果电机可以在任一方向上旋转不止一圈,则编码器无法单独告诉您通电后的绝对位置。可以使用归位程序和归位传感器。
一种常见的解决方案是在导轨的一端安装机械、感应或光学限位开关。上电后,控制器通过限位开关驱动电机朝轨道末端移动,直到开关检测到到达末端。这是“0”位置,并且通过编码器相对于该固定位置测量电机的任何移动/旋转。
绝对编码器可以在通电时提供位置信息。增量不能。正常顺序是运行电机并加载回原点开关并将编码器计数器归零。此后,需要使用可逆计数器来跟踪计数。
了解更多
编码器相关知识,敬请关注
网站。公司技术团队为您免费提供编码器的选型、安装、调试、保养等技术指导服务,尽量避免企业因为编码器技术人员的短缺带来的损失,采取拉线上+拉线下服务的服务形式,帮助企业解决技术难题。

 在线QQ
在线QQ 186-2947-6872
186-2947-6872 在线咨询
在线咨询

 info@motion-control.com.cn
info@motion-control.com.cn