磁编码器是怎么进行安装调试的
本文主要介绍了磁编码器的工作原理,探讨了采用小型磁编码器的电主轴编码器的设置技术,经过研究,总结出了适用于该系列磁编码器的一些安装调试方法。通过编码器的相关信号调节编码器与齿轮板的相对位置,从而提高了磁编码器的输出信号强度和检测精度。

什么是磁编码器
在现代自动控制领域,编码器经常用于旋转部件,以获得旋转部件的精确位置信息。通常使用光电编码器和旋转变压器等角度传感器来获取旋转部件的位置和速度信息。然而,旋转变压器体积大、精度低,光电编码器无法承受强烈的振动,这在一定程度上限制了工作环境。磁编码器是一种基于磁敏元件的新型检测装置。与光学编码器相比,磁旋转编码器具有体积小、速度快、成本低、不易受到油、水蒸气等外部污染的优点。抗干扰能力强,抗冲击振动能力强。因此,近年来,它们在工业生产中的应用,特别是在自动化控制中的应用有所增加。
磁性编码器的原理
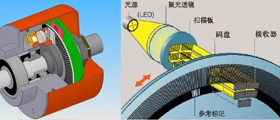
磁编码器是一种新型的角度或位移传感器,它使用磁阻或霍尔元件来测量角度或位移变化的磁性单元。磁性编码器中的磁性装置取代了传统的码盘,编码器上的永磁体对旋转的齿轮盘进行磁化。当磁化的齿轮盘与旋转部件一起旋转时,齿轮盘产生周期性的空间漏磁,直接影响磁阻,这导致内部光束由于洛伦兹力而偏离或螺旋。这导致磁感应部件内的电势差发生变化。宏观表现为编码器传感器元件的磁阻的电阻值随着外部磁场的变化而变化。磁阻效应是操作磁编码器的基本物理原理。磁极的数量,即齿盘上的齿数,决定了编码器的分辨率。磁极的均匀性和剩磁的强度决定了旋转编码器的结构和输出信号的质量。
编码器的安装和设置
提供了一种在有限空间内实现旋转运动的齿轮、电机和高速电主轴的非接触测量技术解决方案。它与0.3mm或0.5mm模块的高精度齿轮盘耦合。磁编码器的输出信号为两个相位差为90°、频率范围为0-200kHz的正弦信号。编码器电缆的最大长度为100米,工作电压为5伏,原点的识别形式为凹槽。为了在传动盘高速旋转过程中保持良好的动平衡,并减少离心力的偏转,应在传动盘的对称位置钻孔。
编码器共有六个信号输出,可分为三个部分,即U1、U2和UN。当测量速度或位置以增加信号强度并提高抗扰度时,减去具有正足迹的信号和具有负足迹的信号。当齿轮顺时针旋转时,U1的相位在U290度之前,当齿轮逆时针旋转时U2的相位在U190度之前。编码器每转输出一个UN脉冲。
编码器信号输出插头是一种标准插头,可以通过转换连接到常见的主轴驱动器,具有良好的兼容性。连接器接线方法与表1中的引脚编号相对应,引脚8和9是温度传感器的接线引脚。这意味着来自温度传感器的信号通过引脚8和9进入伺服模块。
在维度表中,d是最重要的维度。如果这个参数太大,输出信号的幅度就会减小,并影响速度和位置检测的准确性。如果由于齿轮盘制造精度的限制而过小,在高速旋转过程中,在离心力的作用下很容易出现偏差,导致齿轮盘划伤编码器表面,对编码器造成无法修复的损坏。表中的推荐值可以补偿这两个方面的影响,使编码器可以在更长的时间内稳定运行且无误差。
如果模块为0.3mm,则应使用0.15mm探针规;如果模块为05mm,则应采用0.20mm探针规。首先,在不拧紧螺钉的情况下将编码器连接到安装位置。然后将相应的探针规放置在齿盘的齿尖和编码器之间,使三者牢固连接,并尽量确保编码器的对称线穿过齿盘的中心,即编码器的对称直线与齿盘的对称直线重合。然后使用扭矩扳手拧紧螺钉,最大扭矩为60Ncm。拧紧螺钉后,拔出探针规,然后使用专用电子设备细化编码器的位置。
编码器测试仪是一种便携式手持式测试仪,型号为GEL 210Y005。通过检测U1、U2和UN相关信号,可以精确地调整磁性编码器相对于齿轮的几何安装位置。首先,为编码器制作一个适配器,连接电线的方法如表1所示。适配器完成后,将磁性编码器连接到测试仪器上,通过测试仪器左侧的开关切换测试元件,然后手动旋转主轴。测试仪器显示相关测试元素的值。基于这些值的大小,可以确定几何位置偏差。然后手动调整缩小方向的偏差,并再次进行测量。经过反复调整,测量值保持在允许范围内。
间隙是设置磁编码器的一个重要参数,它直接影响信号幅度的大小。信号幅度与磁编码器检测到的表面磁场强度成正比,磁场强度与磁编码器到齿轮盘的距离成反比。幅度杂散A/B和峰值参考spor分别表示信号U1/U2的幅度。参考点信号。正常情况下,检测值在AC 290-400mV的范围内,表明气隙范围符合要求,如图3所示。
信号参考偏移的调整应在气隙调整完成后进行。在磁性编码器的安装过程中,存在一个偏差,该偏差主要影响正负信号合成后信号波形的整个纵向移动的距离。合成信号可以用一个公式表示,其中该值表示在DC+20mV范围内正常满足安装要求的信号偏移的距离。造成这种现象的主要原因是编码器位移后靠近齿盘的一端的信号幅度过大,导致合成信号参考的偏差。
了解更多
编码器相关知识,敬请关注
网站。公司技术团队为您免费提供编码器的选型、安装、调试、保养等技术指导服务,尽量避免企业因为编码器技术人员的短缺带来的损失,采取拉线上+拉线下服务的服务形式,帮助企业解决技术难题。

 在线QQ
在线QQ 186-2947-6872
186-2947-6872 在线咨询
在线咨询

 info@motion-control.com.cn
info@motion-control.com.cn