编码器在伺服系统中的干扰故障是怎么回事?
高精度
伺服编码器被用于许多行业。作为一些自动化机器的关键部件,它在自动控制系统中的适用性,是高速电机伺服编码器线的常见应用。高速电机伺服编码器线路的可靠性和可靠性立即危及机器和设备的特性,而危及其可靠性和可靠性的关键因素之一是抗干扰问题,接下来,西安德伍拓公司和大家一起讨论这个干扰问题以及如何解决它。
1. 编码器报警含义:
|
号码
|
信息
|
内容
|
|
360
|
n AXIS: ABNORMAL CHECKSUM(INT)
|
内置脉冲编码器发生校验和错误。
|
|
361
|
n AXIS: ABNORMAL PHASE DATA(INT)
|
内置脉冲编码器发生相位数据错误。
|
|
362
|
n AXIS: ABNORMAL REV.DATA(INT)
|
内置脉冲编码器发生转速计数错误。
|
|
363
|
n AXIS: ABNORMAL CLOCK(INT)
|
内置脉冲编码器发生时钟错误。
|
|
364
|
n AXIS: SOFT PHASE ALARM(INT)
|
数字伺服软件检测到内置脉冲编码器的无效数据。
|
|
365
|
n AXIS: BROKEN LED(INT)
|
内置脉冲编码器发生LED错误。
|
|
366
|
n AXIS: PULSE MISS(INT)
|
内置脉冲编码器发生脉冲错误。
|
|
367
|
n AXIS: COUNT MISS(INT)
|
内置脉冲编码器发生计数错误。
|
|
368
|
n AXIS: SERIAL DATA ERROR(INT)
|
内置脉冲编码器发出的传输数据无法接收。
|
|
369
|
n AXIS: DATA TRANS. ERROR(INT)
|
从内置脉冲编码器接收的数据发生CRC或停止位错误。
|
|
380
|
n AXIS: BROKEN LED(EXT)
|
分离型检测器的LED错误。
|
|
381
|
n AXIS: ABNORMAL PHASE(EXT)
|
分离型直线尺发生相位数据错误。
|
|
382
|
n AXIS: COUNT MISSEXT)
|
分离型检测器发生脉冲错误。
|
|
383
|
n AXIS: PULSE MISS(EXT)
|
分离型检测器发生计数错误。
|
|
384
|
n AXIS: SOFT PHASE ALARM(EXT)
|
数字伺服软件检测到分离型检测器的无效数据。
|
|
385
|
n AXIS: SERIAL DATA ERROR(EXT)
|
分离型检测器发出的传输数据无法接收。
|
|
386
|
n AXIS: DATA TRANS. ERROR(EXT)
|
从分离型检测器接收的数据发生CRC或停止位错误。
|
|
387
|
n AXIS: ABNORMAL ENCODER(EXT)
|
分离型检测器发生错误。详情请与光栅尺制造厂家联系。
|
上表部分术语的理解:
内置脉冲编码器或内置式:指轴的速度位置数据取自装在 FANUC 伺服电机内的编码器。
分离式检测器或分离式:指轴的速度数据取自装在 FANUC 伺服电机内的编码器,而位置数据则取自与丝杠直连的检测器如分离式编码器或安装在床身上的光栅尺、直线尺等。
相位异常或相位数据报警:可以理解为在编码器内部芯片之间数据传输时发生异常报警。
软相报警:可以理解为编码器的位置数据异常或数据无效报警。
2. 编码器电缆连接图
编码器型号:A860-2000-T301;A860-2000-T321;A860-2001-T301;A860-2001-T321;A860-2005-T301;A860-2005-T321
编码器插座管脚接法如图:

3. 编码器报警的解决办法
361-AL:在编码器内部芯片之间传输异常报警,修改参数解决。
364-AL:位置数据异常报警,多为干扰引起,测量反馈线的噪音,排查干扰源。
365-AL:LED 没有连接报警,换编码器。
366-AL:脉冲丢失报警,信号振幅太低,换编码器。
367-AL:计数丢失报警,测量反馈线的噪音,换编码器。
368-AL:数据错误报警,放大器与编码器之间通讯停止,检查反馈连接,换编码器。
369-AL:CRC 错误报警,放大器与编码器之间通讯扰乱,测量反馈线的噪音。
453-AL:阿尔法软件无连接报警,位置数据与极数据之间的关系异常,换编码器。
当含有 368 报警等多个编码器报警同时发生时,按 368 报警处理。
当含有 369 报警等多个编码器报警同时发生时,按 369 报警处理。
3.1AL-361 报警:Phase alarm 含义:编码器内产生不正确的检测报警。
AL-361 报警产生时,通过关机重启可消除,因为只是在编码器内产生不正确检测,并不是实际故障。通过修改下面参数可防止 361 报警发生。
16i、18i、21i 2276.2=1
15i 2689.2=1
开机时编码器内 LSI 与 EEPROM 之间数据传输出现异常时出现 361 报警。
第一次上电时,EEPROM 在编码器内存储电机信息
3.2AL-364 报警:Soft Phase alarm 含义:干扰引起位置数据异常。AL-369 报警:CRC Error 含义:干扰引起伺服放大器与编码器通讯紊乱。
测量反馈线噪音的方法:
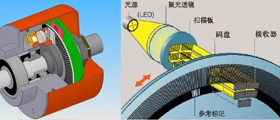
示波器的地线探头接 JF1 的 12 脚(0V),信号探头测量 5(SD)脚、6(*RD)脚。测量编码器噪音图如下图:

当噪音 VCN 超过 10VP-P 或 VDN 超过 1VP-P,可以通过系统的 DGN356 查看反馈插补计数来代替示波器,通常 DGN356 显示 0,当从编码器来的位置数据混乱时,DGN356的值会上升,关机后会清除,开机时显示 0。当无穷大的反馈数据接收到时,伺服软件将自动纠正,纠正值就叫反馈插补值。当异常数据连续检测到时,就会产生 AL-364 报警。
3.3针对噪音的解决办法,即针对编码器 364、367、369 报警的解决办法。
对关键线进行合理布线,把信号电缆和强电电缆分开布线,信号地与强电地分别接在不同的地线支架上。

关键地线,如上图2.12.3把 PSMi 的控制电源 CX1A 的地线接在信号地系统上。
连接同一个 PSMi 的所有 SPMi、SVMi 的编码器信号地必须连接在同一个地线支架上如图。

当在 X-Y 平面上有附加轴时,在电机金属外壳上增加地线,而放大器不要连接地线。安装磁环能有效减小干扰对编码器信号的影响。
针对 364、369 报警,首先把磁环安装在位置 A 上,当位置 A 还无法完全避免编码器报警发生时,增加磁环,把增加的磁环安装在位置 B 和 C 上如图。

针对 367 报警,首先把磁环安装在位置 D 上,当位置 D 还无法完全避免编码器报警发生时,增加位置 B 和 C如图。

4. 当编码器发生偶尔干扰报警时,可从下面几项去检查:
1. 检查接地情况。注意零线与地线、强电地与信号地、近地与远地接地电阻的区别。
2. 检查浪涌、灭弧器等装置是否齐全。
3 . 检查电柜布线是否合理。
4. 检查所有电压,必要时用示波器监测控制电压是否有瞬间跌落的情况发生。
5. 检查伺服电机、主轴电机(变频主轴电机)插头插座处连接情况,是否进油进水或接触不良。
6. 编码器电缆检查,如电缆是否破皮、线材是否采用双绞线,屏蔽线是否接地。
7. 伺服电机、主轴电机(变频主轴电机)动力电缆检查,如三相及地线连接是否正确,电缆是否破皮等情况发生。
8. 伺服电机制动器电缆检查,是否采用了带屏蔽层电缆及屏蔽层是否接地。
9. 检查感性负载元件或其回路如换刀用电磁阀、主轴夹紧装置用电磁阀等是否异常,
10. 接触器、继电器触点火花是否正常。
11. 加工时传导到编码器本身的振动现象是否严重。
12. 周边是否有高频低电压大电流的设备在工作,如电焊机、高频炉等。
13. 总结发生最频繁报警的规律,如某个程序段、某个动作指令、某个时间段,轴移
14. 动速度、电缆移动位置、各轴相对位置等信息。
15. 编码器长度越长,里面的0V,5V线径越粗。
解决有关
编码器的干扰问题时,应该从系统设计入手,根据实际现场的应用与环境条件选择合适的设备,编码器系统一般受到共模和差模干扰,对于共模干扰来讲我们可选择差分类型的编码器,比如双极性类型,对于差模干扰,一般对于电缆选择,线路路径,电源系统隔离处理,信号参考等需要仔细设计与布置。

 在线QQ
在线QQ 186-2947-6872
186-2947-6872 在线咨询
在线咨询

 info@motion-control.com.cn
info@motion-control.com.cn