浅析
磁性编码器的结构组成和原理
磁性编码器的最大优势可能是其坚固性。与光学编码器不同,磁性版本对灰尘,污垢,液体和油脂等污染物以及震动和振动不敏感。与光学编码器类似,磁性编码器确实需要在磁盘和传感器之间留有气隙。但是,磁性编码器中的气隙不需要像光学编码器那样清洁和透明。只要在磁盘和传感器之间不存在任何含铁材料,就会检测到电磁脉冲。磁性编码器正确运行的两个重要规范是传感器相对于磁盘(或磁带)的径向位置以及传感器与磁体之间的间隙距离。
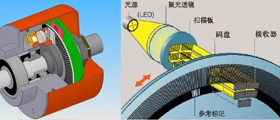
磁性编码器的主要部分由磁阻传感器、磁鼓和信号处理终端组成。磁鼓被记录在相同距离的小磁极中。磁极磁化后,磁极旋转时会产生周期性的空间漏磁场。磁传感器探头通过磁阻效应将变化的磁场信号转换为电阻值的变化。在外部电势的影响下,改变的电阻值被转换为电压的改变。在随后的信号处理电路之后,模拟电压信号被转换成可由计算机识别的数字信号,并实现磁性编码器的编码功能。

磁鼓磁化的目的是磁化磁鼓上的每个小磁极,这样当磁鼓随电机旋转时,磁鼓可以产生周期性的空间漏磁,该漏磁作用于磁阻以实现编码功能。磁鼓的磁极数决定编码器的分辨率。磁鼓磁极的均匀性和剩磁是决定编码器结构和输出信号质量的重要参数。下图:磁鼓表面的磁极分布。

磁阻传感器由磁阻传感器组成,可分为磁阻半导体器件和强磁磁阻器件。为了提高信号采样的灵敏度并考虑差分结构对敏感元件的温度特性的补偿效应,在磁化间隔中蚀刻具有开路/2相位差的两条带以形成半桥串联网络。如下所示:

同时,为了提高编码器的分辨率,可以平行于磁头安装几个磁阻传感器元件。当施加电压时,磁阻元件通过磁鼓的旋转发射相应的正弦波。原理很容易解释:磁鼓产生的NS磁场呈圆形运动,磁阻元件制成的传感器的电阻随磁场的变化而变化,检测到Sina和SinB两种电压波形。磁阻传感器的结构如图所示。磁阻传感器分为两组,距离为1/4 NS。正弦电压波形可在Mr1、Mr2、Mr3和Mr4的触点处检测到。同样的原理也适用于SinB电压波形,可以在Mr1,Mr2,Mr3和Mr4的触点上检测到。

信号处理电路:Sina和SinB信号到达信号处理电路后,必须将波形调整到CPU扫描范围内。首先,必须设置AB信号的DC电压电平,使得AB信号的直流电平位于DSP-A/D采样电压范围的中心,并且幅度不超过采样电压范围。通过模拟滤波器和数字滤波器对高频和谐波进行滤波后,利用DSP的高速运算能力实时计算位置和速度;此外,另一种处理方法是在进行DSP之前,直接通过信号处理电路将Sina和SinB信号转换为方波。后者可以更方便地进行软件处理。
磁性旋转编码器的分辨率取决于磁盘周围的磁极数和传感器的数量。增量编码器(无论是磁性编码器还是光学编码器)都使用正交输出,并且可以使用X1,X2或X4编码来进一步提高分辨率。增量编码器和绝对编码器之间的主要区别在于,无论采用何种传感技术,绝对版本都为每个测量位置分配了唯一的二进制代码或字。即使断电,这也使他们能够跟踪编码器的确切位置。
了解更多
编码器相关知识,敬请关注
网站。公司技术团队为您免费提供编码器的选型、安装、调试、保养等技术指导服务,尽量避免企业因为编码器技术人员的短缺带来的损失,采取“线上+线下”服务的服务形式,帮助企业解决技术难题。

 在线QQ
在线QQ 186-2947-6872
186-2947-6872 在线咨询
在线咨询

 info@motion-control.com.cn
info@motion-control.com.cn