如何使用
旋转编码器将机械旋转快速转换为数字信号
在数字时代,有必要快速有效地测量电机或旋钮上机械轴的旋转。电位计和旋转开关等模拟方法被可直接数字化旋转运动的旋转编码器取代。然而,设计者必须能够理解不同编码器类型之间的差异,并准确分析编码器的数字输出。

西安德伍拓自动化接下来为大家介绍了旋转编码器的功能和工作原理,然后解释如何解释信号,最后介绍几种编码器解决方案及其实际应用。
编码器的功能
旋转编码器是测量机械轴旋转的传感器。轴可以连接到电机上,编码器读取角位置或速度。您还可以读取仪器或设备正面的刻度盘、按钮或其他电子控制单元的角度位置,并更换电位计和旋转开关。
让我们来看看家用电器上的定时器控制单元。在较早的模拟时间,可以使用可变电阻器或电位计测量ECU的位置。今天基于微处理器的设计允许编码器产生更高效的数字输入。
编码器也可用于控制器中,以向移动的机械部件提供反馈,以正确响应控制命令。无论是在汽车或机器人设备的控制中,编码器都可以为控制微处理器提供必要的检测。旧的解决方案(如单圈电位计)无法检测轴的完整旋转,但旋转编码器可以检测轴的完全旋转而不会停止。
编码器将这些机械位移转换为电信号,并将其发送至处理器进行分析。根据编码器的电功率,可以导出旋转方向、角位置和旋转速度。编码器的数字输出比电位计更便于此过程。
编码器的工作原理
编码器主要有两种类型,增量编码器和绝对编码器。增量编码器读取角位移的变化,而绝对编码器读取编码轴的绝对角度。它们使用三种常用技术实现,即光学、机械或磁性技术。
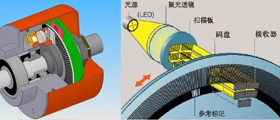
光学编码器设计有一个编码盘,该编码盘具有透光性和遮光性,可以让光线通过特定区域。光电二极管在代码盘的两侧使用LED和光电二极管(图1)。光电二极管检测流经码盘的光,并将光透射和阴影图案的脉冲波形输出到相应的码盘部分。
图1:增量和绝对代码盘示例。增量码盘产生两个方波信号,它们之间存在相位差。绝对码盘输出二进制编码数据。
图1中的绝对代码盘有四个输出,为代码盘上的每个部分提供唯一的二进制代码。在本例中,代码为16(表1)。二进制码的替代方案是格雷码,格雷码是相邻二进制字之间只有一位差的二进制码。

表1:四位绝对编码器的十六种二进制状态。
增量码盘产生的模式由相位差为90°的两个方波组成,称为正交输出。这种功率也可以通过单线模式和两个位移对应于90°相移的光电传感器来实现。
正交增量编码器的输出通常被称为“A”和“B”。编码器还可以包含每转产生一个脉冲的第三脉冲,称为索引脉冲,以提供已知的物理参考。通过将索引脉冲与正交输出相结合,可以计算绝对轴方向。
通过以90°相移记录两个输出,您不仅可以记录角度旋转,还可以记录旋转方向(图2)。

图2:正交信号之间的相位关系可以确定旋转盘的运动方向。
当编码器轴顺时针旋转时,波形A传导波形B。当旋转方向变为逆时针时,信号B传导信号A。
使用两个正交信号,可以分析每个循环的四个状态。单个周期中的状态为a=1和B=0、a=1、B=1、a=0和B=1,最后一个a=0、B=0。这意味着方形输出编码器的角分辨率是额定每转脉冲数(PPR)的四倍。
通过在示波器上观察和测量光学编码器的正交输出,可以确定输出之间的相位关系(图3)。A信号显示在上轨道,而B信号显示在下轨道。设置示波器相位参数P1以测量A和B信号之间的相位差。两个信号之间的平均相位差为90.4˚。

图3:每转512个脉冲的光学编码器的正交输出显示了A和B信号输出之间的相位关系。
在本例中,仅使用单个a输出,因为编码器用作转速计数器以测量电机速度。用示波器参数P2测量的A信号的频率为28.87 kHz。将该值除以512脉冲/转(PPR)转换为轴速度,然后乘以60以获得轴角速度(以每分钟转数(RPM)为单位)。
基于这些数字,编码器的512 PPR提供了0.7度的基本分辨率。通过分析A/B状态,分辨率可达0.175˚。
光学编码器在所有编码器类型中具有最高的分辨率,这是它的天然优势。由于其低成本,它非常适合低价格的低端应用。缺点是它们可能很笨重。
机械编码器使用旋转码盘,其中包含与光学编码器相同图案的同心环。在这些同心环中,图案由导电区和绝缘区组成。固定电刷触点滑动到旋转码盘上,并与每个环接触,起到开关的作用。当码盘表面上的触点来回移动时,它在刷导电区域时接触,或者在刷绝缘区域时断开。通过这种方式,为每个环开发一个数字图案。
机械编码器的一个可能的问题是接触抖动会导致噪声。这种噪声可以通过低通滤波消除,或者在抖动噪声消失后使用软件检查输出状态。
机械编码器通常是最便宜的编码器。它们通常用作电子前面板上的用户界面,以取代电位计。
磁性旋转编码器使用多极圆形磁铁。交替的南北磁极由霍尔效应或磁阻传感器检测,当磁体旋转时产生正交电输出。与光学编码器一样,磁性编码器是非接触式的,与接触式机械编码器相比,工作速度更快,持续时间更长。
编码器的使用方法
编码器的机械和电气特性要求其连接到机械设备或由用户操作。当用作电子设备上的控制接口时,编码器使用实心轴,通常通过与硬件相连的板安装插座安装在控制面板上。
设计师可以选择支架等选项,以在编码器旋转时产生机械“咔嗒”噪音,从而给用户提供编码器波正在移动的触觉反馈。设计者还可以选择短触点开关,通过按下编码器轴来激活。
编码器可安装在旋转机器(如电机或伺服电机)上,有两种选择:空心轴或盲轴(图4)。

图4:空心或盲轴结构的旋转编码器用于安装在电机或其他机电设备上。
空心轴编码器安装在电机或类似机械设备的轴上。这确保了它与被监控设备同心安装,以避免不对称或角度误差。盲轴是一个深度有限的空心轴,用于将编码器安装在电机轴的末端。
编码器的选择和应用
编码器的选择取决于应用要求、环境和成本限制。
CTS Electronic Components的291V1022F832AB是一款由5V电源供电的8-PPR角度光学增量编码器(图5)。291系列支持4至64 PPR的PPR分辨率,并提供不同的波型和长度以及插孔选项。它还可以配备集成开关。编码器的额定工作时间可达三百万转。

图5:CTS 291V1022F832AB,带典型螺纹衬套、锁紧垫圈和锁紧螺母,用作控制柜控制。
CTS 291系列光学编码器是仪器控制应用的理想选择,包括医疗和实验室设备、通信、工业、HVAC、交通、安全、音频和家庭娱乐设备。
32-PPR到256-PPR增量磁编码器,通过5V或3.3V电源工作。该设备是EMS22Q系列非接触式编码器的一员,支持32-256 PPR角分辨率。与以前的旋转编码器一样,它有多种可用的轴和衬套配置,但额定旋转时间为5000万转。这些编码器非常适合极端温度、湿度和颗粒污染的恶劣工业环境。

此外,与许多编码器一样,该设备的连接和使用也很容易(图6)。
图6:引脚详细信息EMS22Q51-D28-LT4(左屏幕截图)和框图显示了256 PPR增量磁无触点编码器与微控制器的简单连接。
EMS22Q系列有六个引脚。一个电源引脚和一个接地引脚,一个连接到微控制器或微处理器的低效芯片,一个索引引脚和两个数据引脚(A和B)。得到的正交输出如图7所示。

图7:PPR范围为32至256的EMS22Q正交输出
机械编码器对于廉价和业余应用的开发人员非常有用,例如TT Electronics的EN11-HSM1AF1520 PPR编码器。编码器是EN11系列,提供15或20-PPR角度分辨率、各种轴和插座长度、可选开关和各种插孔配置。编码器由5V电源供电。其价格约为光学编码器的十分之一,旋转寿命为30000转。
总结
旋转编码器可以快速有效地检测前面板控制、机械臂或旋转电机轴的角度旋转,并进行数字转换以满足相关要求。增量或绝对编码器为微处理器或微控制器提供必要的接口,以检测和控制机电系统组件。
了解更多
编码器相关知识,敬请关注
网站。公司技术团队为您免费提供编码器的选型、安装、调试、保养等技术指导服务,尽量避免企业因为编码器技术人员的短缺带来的损失,采取“线上+线下”服务的服务形式,帮助企业解决技术难题。









 在线QQ
在线QQ 186-2947-6872
186-2947-6872 在线咨询
在线咨询

 info@motion-control.com.cn
info@motion-control.com.cn